
A few weeks ago, I finally got around to testing the thrusters on the ferry boat. These are very small thrusters meant for a small ROV (remote operated vehicle), but I don’t intend the ferry boat to go very fast.
First we mounted a simple arcade joystick into a box with a microcontroller and connected up a 20Ah lead acid power battery:
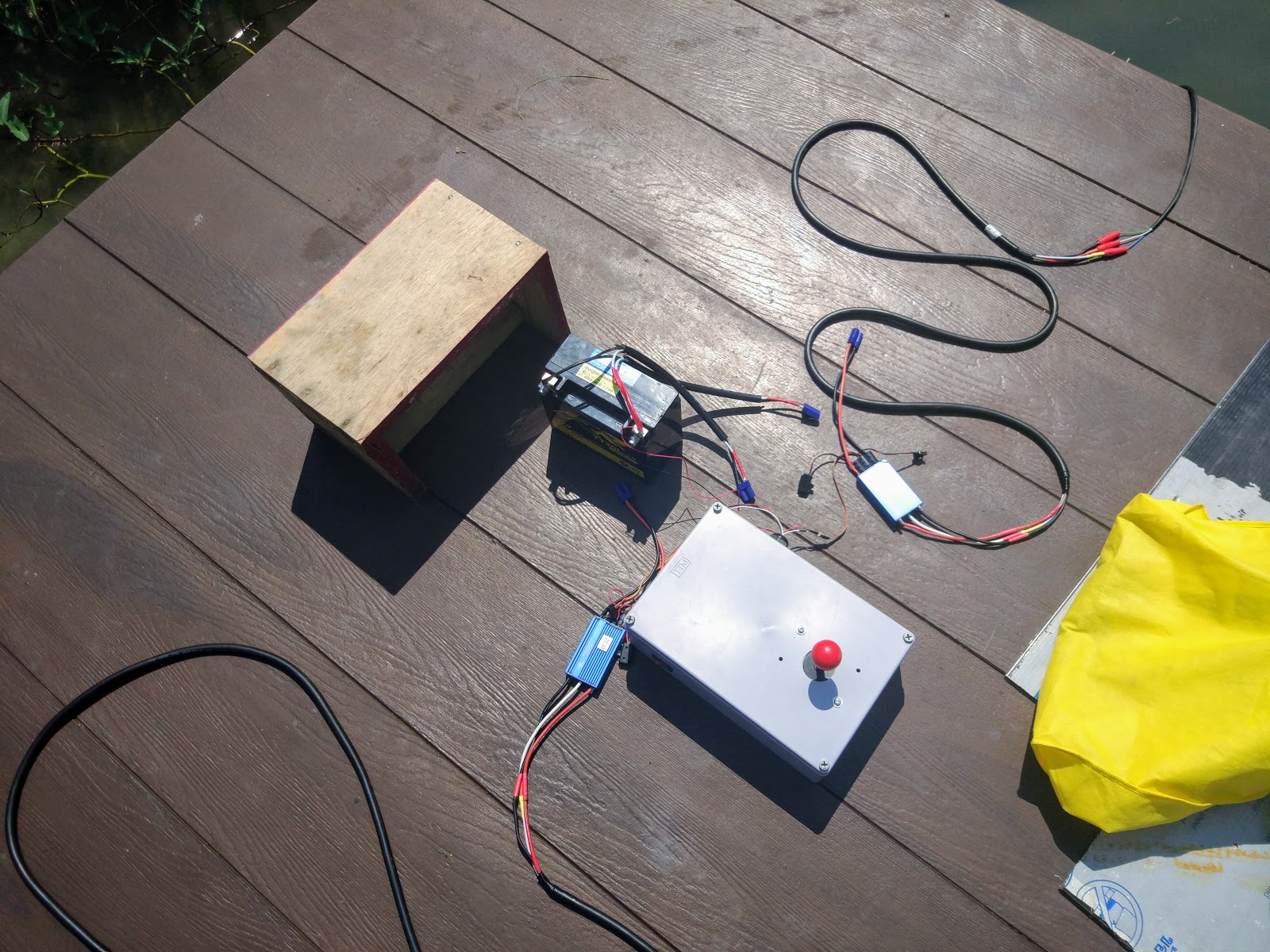
(Gotta love the red clown-nose style arcade joystick handle.)
The small blue boxes are the electronic speed controls for the thrusters.
Here is a picture of the inside of the drive box:
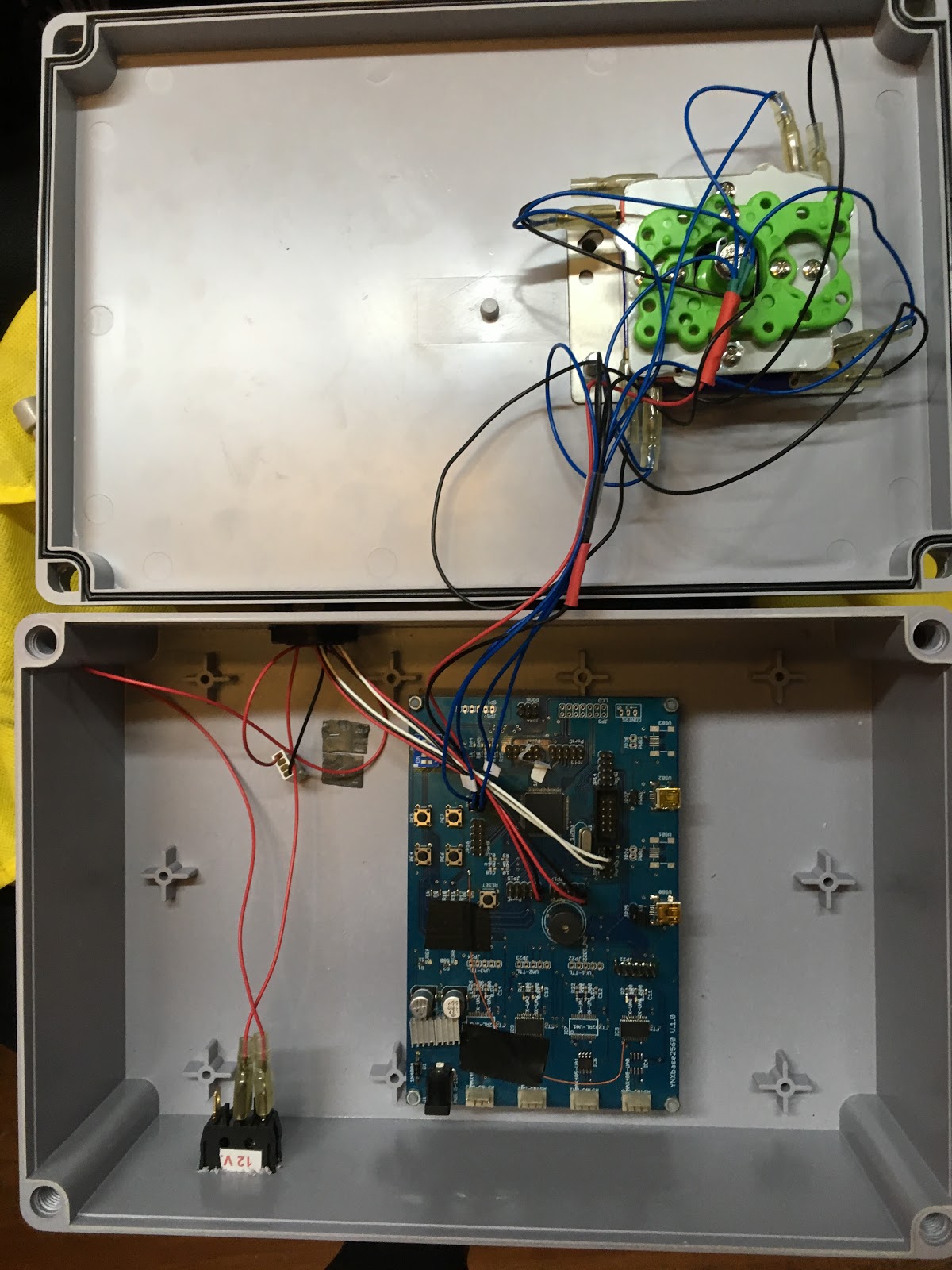
On the bottom (inside the box) is one of our generic ATmega2560 boards and at the top of the photo you can see the bottom of the joystick mounted to the underside of the lid.
Here are some photos of the thrusters mounted on each side of the ferry boat in the water:


The microcontroller is programmed for differential drive where by “joystick up” slowly ramps up both thrusters toward forward thrust and “joystick down” slowly ramps towards both sides reverse thrust. But right and left slowly ramp towards one side forward and the other reverse, with the diagonals blending the two. The slow ramps over the course of a few seconds allows for finer control, and the ferry boat is so large relative to the amount of thrust, it won’t have quick response anyway.
Once we got it all hooked up and I could drive around with it, I had quite a blast.



Here are a few short videos showing it in action:
We still have some more motor configurations to test, and then it will be time for exploring autonomous control using GPS and other sensors.