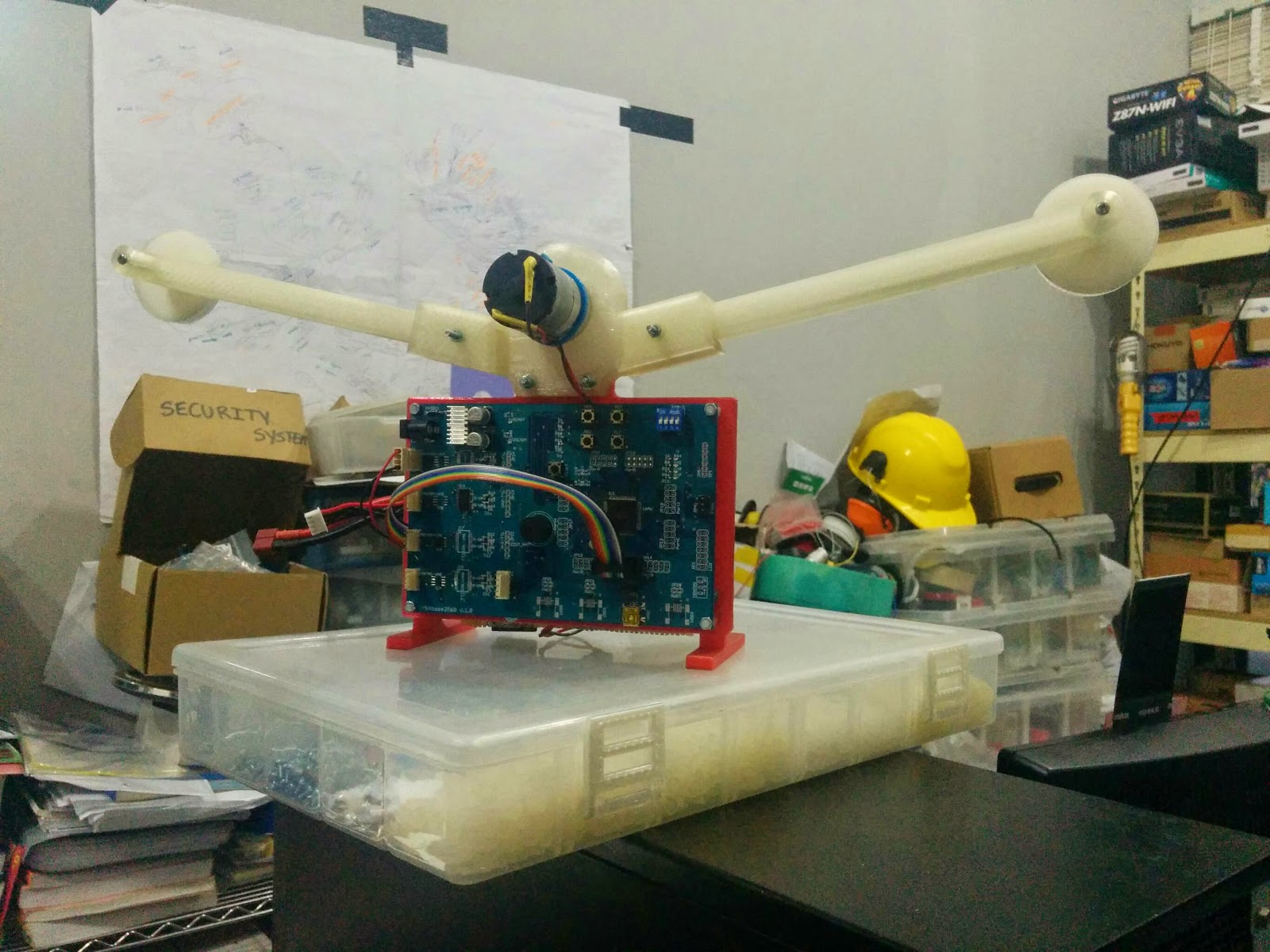
This is a picture of the motorized SlingBot prototype with battery, microcontroller, and L298 based motor driver circuit installed. It seems to go about 75cm per second which is about 3/4 of my target of 1 meter per second, but this is plenty good enough for this prototype.
We might be able to speed it up by decreasing the bend in the wire, thus decreasing the load on the motor, but I’ll have to test this prototype more before tweaking anything like that.
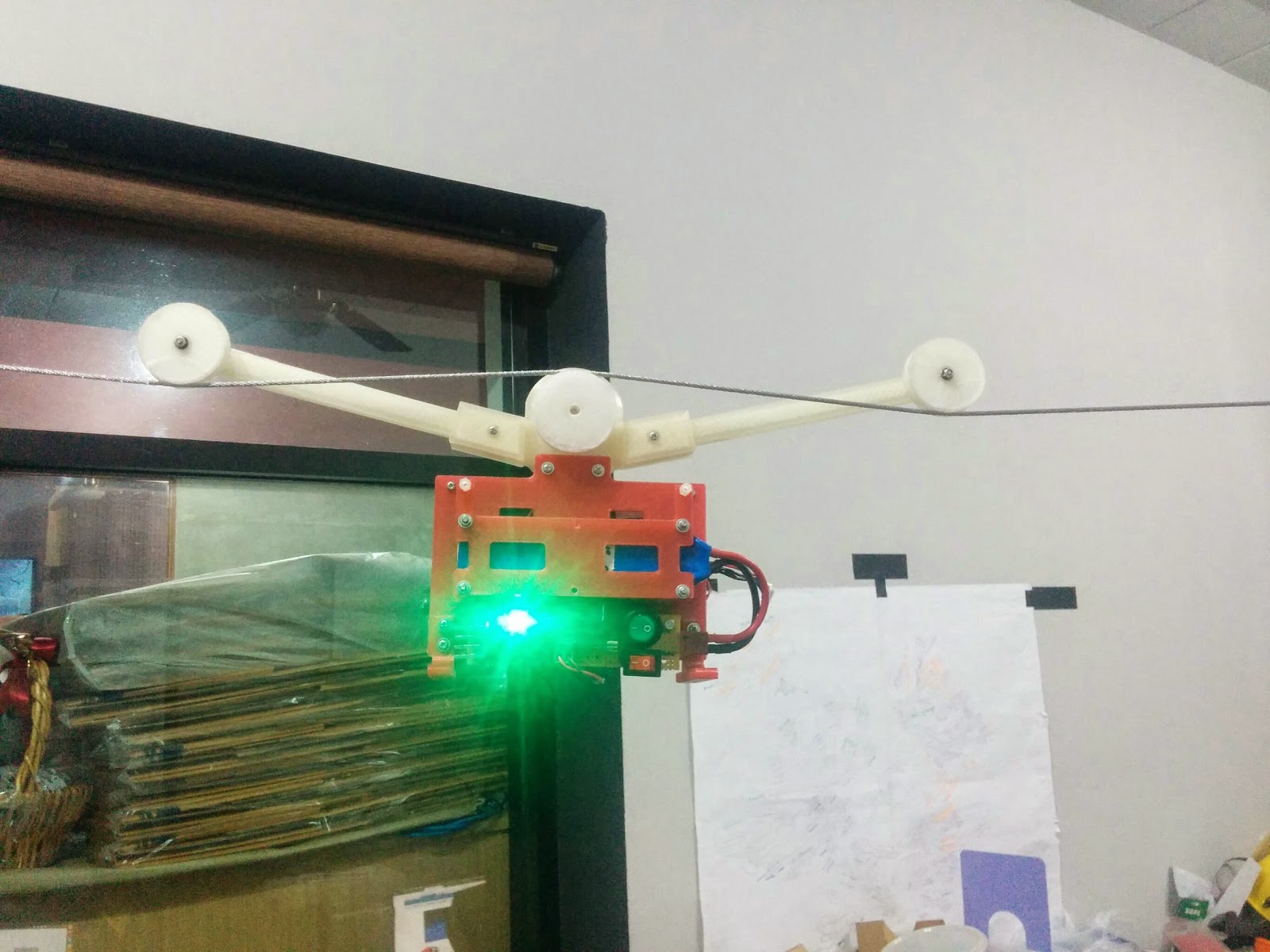
Here is a view of the other side with the motor and microcontroller board: